A look at Figma RoboCop's articulation design after the previous posting. ^^





Standard range of vertical tilt for the head.


Without any hair, protruding helmet, or tall collar armor to block its moving path, rotating the head from side to side can be done very easily.


As you can see, apart from the head, the neck itself is a separately movable part.

Separating the head and neck from the body to reveal the two joints that support the head's posability: a ball-hinge combinational joint right beneath the head, and a ball-type joint at the base of the separable neck joint.

Closeup on the combo joint mentioned above.
So, in total, the head has three three articulation points for its extensive movement. ^^



The abdomen and upper body can be moved independantly of each other.



Forward-backward bends are also possible for the waist.


The upper body can also be flexed to the left and right.

Separating the upper body from the abdomen ...


... to reveal the single ball-type joint with straight peg that enables all the upper body's poses shown above.

Lifting the arm upward from the side of the body is severely limited by RoboCop's tall shoulder. ^^;

The shoulder peg slot is wide enough to allow the upper arm to swivel around the shoulder joint.


The special shoulder swivel shown above allows the arms to be bent inward/outward.


Swinging the arms forward/backward is very easy.

90-degree elbow bend for the figure.

RoboCop's iconic metal bicep, and his rather broad upper arm in general limits the range of elbow joint the figure is capable of. ^^;


The elbow joint can be pulled away from the upper arm for a slight degree, freeing it from the bicep's limitation. With that slight adjustment, the forearm can be swivelled around the upper arm.

Breaking away from the bicep, the elbow can achieve greater than 90 degrees of bending thanks the forearm swivel, but the forearm's position would be completely unnatural. ^^;

Ball-type joints for the wrists, as shown in the previous posting.
The figure's joint design for its hips is very different as compared to that on other figures from the Figma series.

Very limited hip expansion using the ball-type hip joints, which is well expected due to the character design. ^^

Separating the hip component from the legs to reveal the unique hip joint design as mentioned above.



Like an upside down 'Y', the waist-hip joint has an impressive total of five ball-type joints to enable a wide range of movement for the waist and hips, theoretically. ^^
Like many other figures, the potential of Figma RoboCop's special waist-hip joint is limited by the figure's own character design, the tall leg armor in RoboCop's case. ^^;

Without the leg armor's limitation, the figure can perform a forward split with ease. ^^


90-degree knee bend.



An extra benefit due to the Figma knee joint's peg connection: the lower leg can swivel around the thigh for a limited range. ^^



Flexible forward-backward bends for the ankle joint.
The functional piston connecting the calf to the heel is a nice feature of the ankle bend. ^^


The ball-type joint of the piston would often pop off its slot if the ankle bend is too wide, but it can be reattached very easily.

A closeup on the piston.


To accommodate the pipe's movement, the tube is designed to be on a hinge joint.

Using its peg joint, the ankle can swivel from side to side for a limited degree, which should be enough to support the figure in certain standing poses.



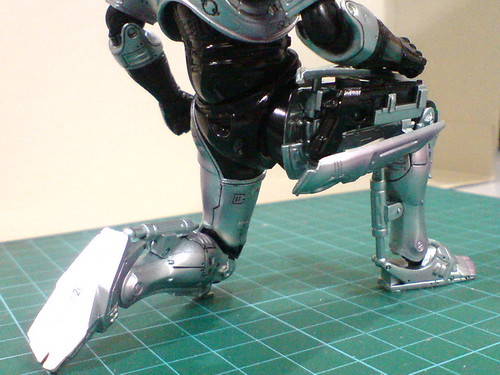
Since the leg armor doesn't limit the hips forward-backward bends, plus the hips and knee artications are pretty good, a natural-looking kneeling pose for the figure can be configured very easily. ^^
This is already beyond what RoboCop did in the original movie I think. XD


Closeups on the bent knees.

The figure can even kneel with its expanded hip armors attached. ^^

The unique character design of RoboCop gave the figure planner more room for creativity when designing its articulation, especially for the Figma series in my opinion. ^^ As a mecha-type figure (although RoboCop is still technically a hybrid between human and mecha), which is also larger than the usual anime female characters that Figma is well known for, there's really no obligation to adhere to the typical Figma joint design used on the latter for RoboCop. As a result of that, RoboCop being a unique addition to the product series is made even more interesting thanks to the articulation design introduced above. ^^
Some action poses from Figma RoboCop coming up in the next posting.




No comments:
Post a Comment